



स्टैम्पिंग/ स्टैकिंग रोबोट SDCX RMD-300/200/160/120/35/08/110/20/50
तकनीकी मापदंड
| प्रतिरूप संख्या। | स्वतंत्रता की डिग्री | ड्राइविंग मोड | पेलोड (किलोग्राम) | बार-बार स्थिति निर्धारण सटीकता (मिमी) | गति की सीमा (°) | अधिकतम गति (°/s) | कलाई का स्वीकार्य भार जड़त्व (किग्रा·मी2) | वृत्ताकार ताल (चक्र/घंटा) | गति की त्रिज्या (मिमी) | स्थानीय वजन (किलोग्राम) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| एसडीसीएक्स-आरएमडी300 | 4 | एसी सर्वो ड्राइव | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 10002 | 3150 | 1500 |
| एसडीसीएक्स-आरएमडी200 | 4 | एसी सर्वो ड्राइव | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 13002 | 3150 | 1500 |
| एसडीसीएक्स-आरएमडी160 | 4 | एसी सर्वो ड्राइव | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 15002 | 3150 | 1500 |
| एसडीसीएक्स-आरएमडी120 | 4 | एसी सर्वो ड्राइव | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 15602 | 3150 | 1500 |
| एसडीसीएक्स-आरएमडी50 | 4 | एसी सर्वो ड्राइव | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 17002 | 2040 | 660 |
| एसडीसीएक्स-आरएमडी20 | 4 | एसी सर्वो ड्राइव | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 17801 | 1720 | 256 |
| एसडीसीएक्स-आरएमडी08 | 4 | एसी सर्वो ड्राइव | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 18001 | 1433 | 180 |
टिप्पणी:
1 परीक्षण ट्रैक 150 मिमी ऊंचा और 1000 मिमी चौड़ा है, और वास्तविक चक्र समय वास्तविक कार्य स्थितियों से प्रभावित होता है;
② परीक्षण ट्रैक 200 मिमी ऊंचा और 1000 मिमी चौड़ा है, और वास्तविक चक्र समय वास्तविक कार्य स्थितियों से प्रभावित होता है;
③ परीक्षण ट्रैक 400 मिमी ऊंचा और 2000 मिमी चौड़ा है, और वास्तविक चक्र समय वास्तविक कार्य स्थितियों से प्रभावित होता है;
ज्वलनशील, विस्फोटक और संक्षारक गैसों और तरल पदार्थों के संपर्क से बचें; पानी, तेल और धूल के छींटे न पड़ें; विद्युत शोर स्रोतों (प्लाज्मा) से दूर रखें।
गति की सीमा
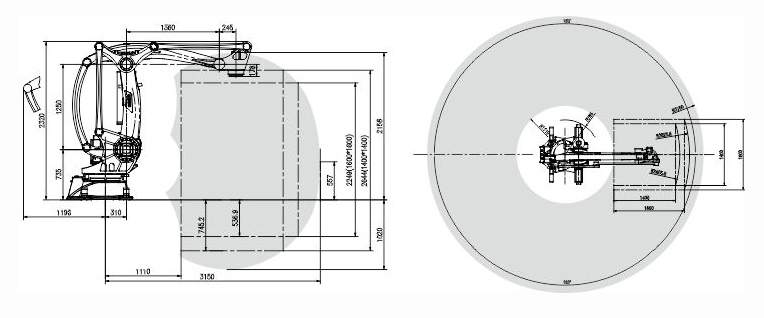
SDCX-RMD300/200/160/120 के लिए गति सीमा का प्लॉट
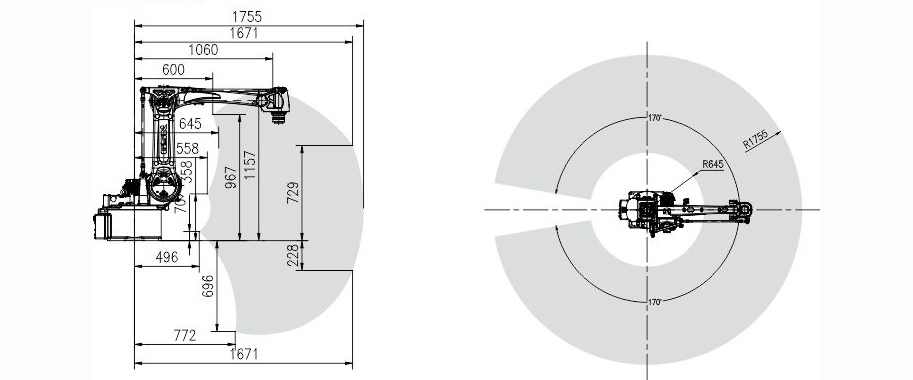
SDCX-RMD20 के लिए गति सीमा का प्लॉट
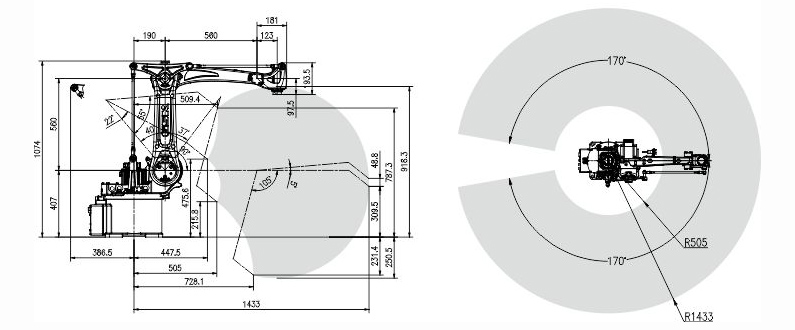
SDCX-RMD08 के लिए गति सीमा का प्लॉट
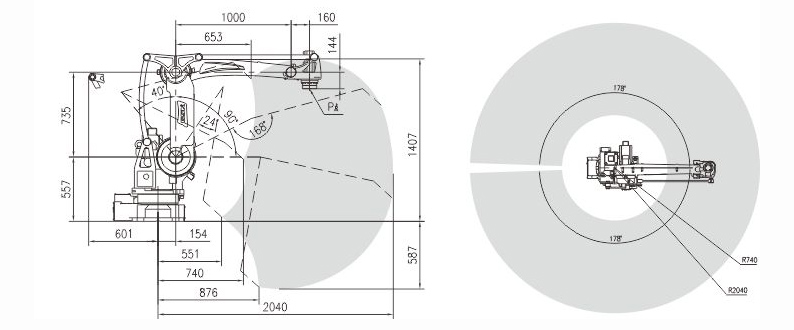
SDCX-RMD50 के लिए गति सीमा का प्लॉट
उत्पाद अनुप्रयोग प्रदर्शन
समाधान
स्टील कॉइल हैंडलिंग परियोजना की तकनीकी योजना












