


एकल अक्ष पोजिशनर/स्वचालित वेल्डिंग पोजिशनर
तकनीकी मापदंड
| एकल-अक्ष क्षैतिज सर्वो पोजिशनर | एकल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोजिशनर | स्पिंडल बॉक्स प्रकार एकल-अक्ष सर्वो पोजिशनर | |||||||||
| क्रम संख्या | परियोजनाओं | पैरामीटर | पैरामीटर | टिप्पणी | पैरामीटर | पैरामीटर | पैरामीटर | टिप्पणी | पैरामीटर | पैरामीटर | टिप्पणी |
| 1. | चूहों से भरा हुआ | 200 किलो | 500 किलो | मुख्य अक्ष के R300mm/ R400mm त्रिज्या के भीतर | 500 किलो | 800 किलो | 1200 किग्रा | मुख्य अक्ष के R400mm/R500mm/ R750mm त्रिज्या के भीतर | 200 किलो | 500 किलो | यह स्पिंडल अक्ष के R300mm त्रिज्या के भीतर है आंतरिक, गुरुत्वाकर्षण केंद्र से फ्लैंज की दूरी ≤300 मिमी |
| 2. | घूर्णन की मानक त्रिज्या | आर300मिमी | आर400मिमी | आर600मिमी | आर700मिमी | आर900मिमी | आर600मिमी | आर600मिमी | |||
| 3. | अधिकतम घूर्णन कोण | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | ±360° | |||
| 4. | रेटेड घूर्णन गति | 70°/दक्षिण | 70°/दक्षिण | 70°/दक्षिण | 70°/दक्षिण | 50°/दक्षिण | 70°/दक्षिण | 70°/दक्षिण | |||
| 5 | दोहराई गई स्थिति सटीकता | ±0.08 मिमी | ±0.10 मिमी | ±0.10 मिमी | ±0.12 मिमी | ±0.15 मिमी | ±0.08 मिमी | ±0.10 मिमी | |||
| 6 | क्षैतिज रोटरी डिस्क का आकार | Φ600 | Φ800 | - | - | - | - | - | |||
| 7 | विस्थापन फ्रेम का सीमा आयाम (लंबाई×चौड़ाई×ऊंचाई) | - | - | 2200 मिमी ×800 मिमी ×90 मिमी | 3200 मिमी ×1000 मिमी ×110 मिमी | 4200 मिमी ×1200 मिमी ×110 मिमी | - | - | |||
| 8 | स्थिति शिफ्टर का समग्र आयाम (लंबाई×चौड़ाई×ऊंचाई) | 770 मिमी ×600 मिमी ×800 मिमी | 900 मिमी ×700 मिमी ×800 मिमी | 2900 मिमी ×650 मिमी ×1100 मिमी | 4200 मिमी ×850 मिमी ×1350 मिमी | 5400 मिमी ×1000 मिमी ×1500 मिमी | 1050 मिमी ×620 मिमी ×1050 मिमी | 1200 मिमी ×750 मिमी ×1200 मिमी | |||
| 9 | स्पिंडल रोटरी डिस्क | - | - | Φ360मिमी | Φ400मिमी | Φ450मिमी | Φ360मिमी | Φ400मिमी | |||
| 10 | प्रथम अक्ष घूर्णन की केंद्र ऊंचाई | 800 मिमी | 800 मिमी | 850 मिमी | 950 मिमी | 1100 मिमी | 850 मिमी | 900 मिमी | |||
| 11 | बिजली आपूर्ति की स्थिति | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | अलगाव ट्रांसफार्मर के साथ | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | अलगाव ट्रांसफार्मर के साथ | तीन-चरण 200V±10%50HZ | तीन-चरण 200V±10%50HZ | अलगाव ट्रांसफार्मर के साथ |
| 12 | इन्सुलेशन वर्ग | H | H | H | H | H | H | H | |||
| 13 | उपकरण का शुद्ध वजन | लगभग 200 किग्रा | लगभग 400 किग्रा | लगभग 500 किग्रा | लगभग 1000 किग्रा | लगभग 1600 किग्रा | लगभग 200 किग्रा | लगभग 300 किग्रा | |||
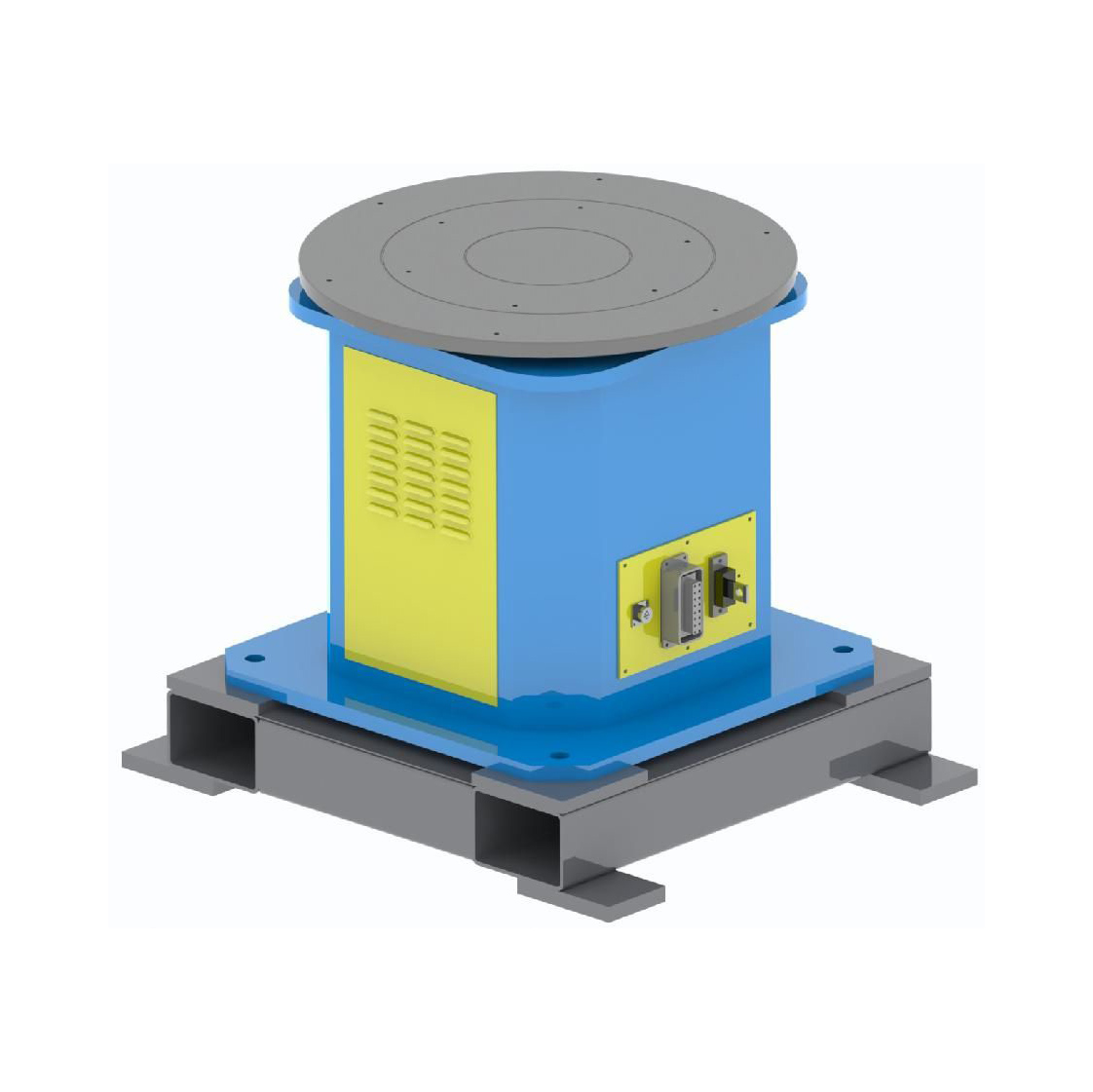
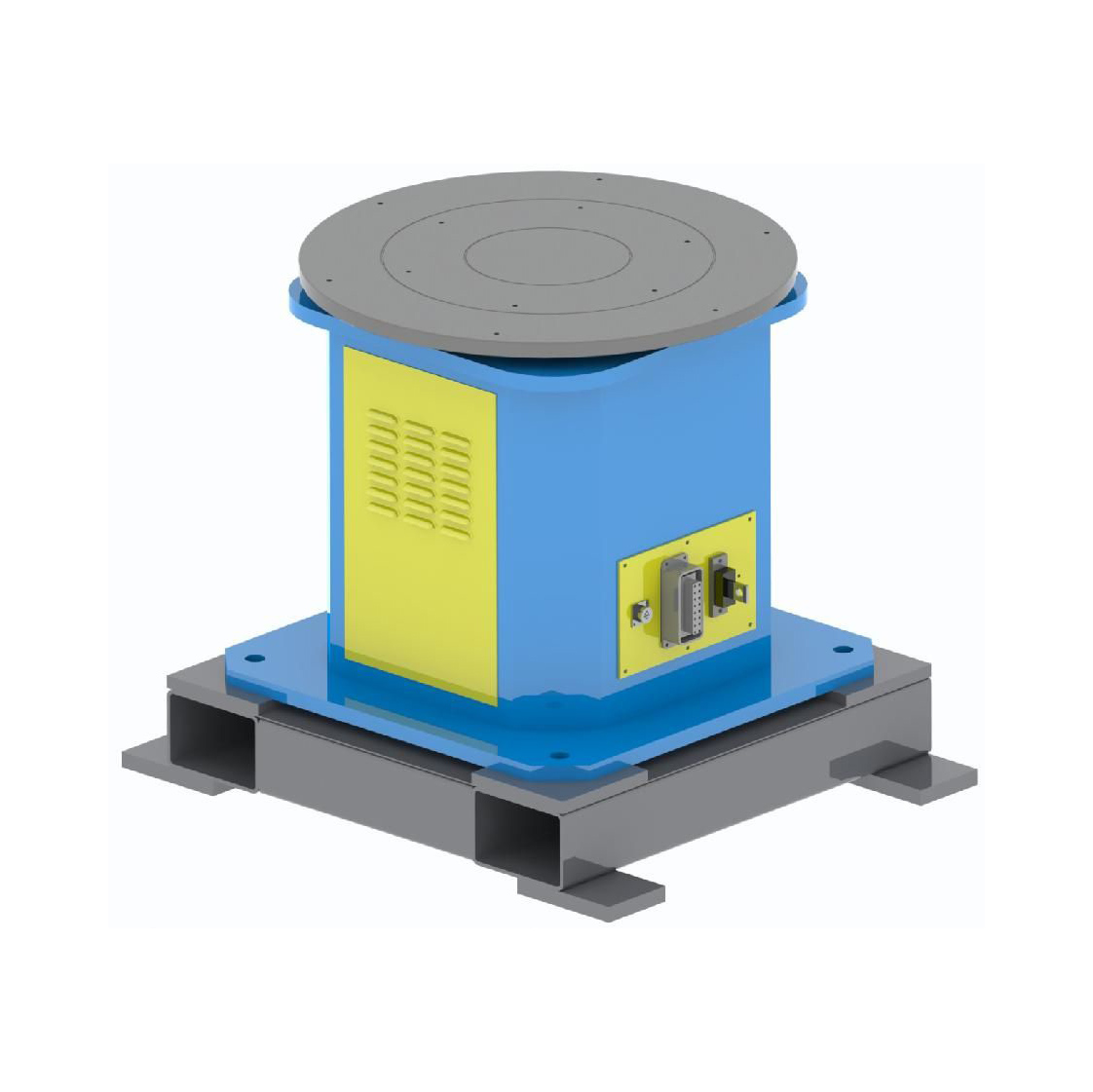
एकल-अक्ष क्षैतिज सर्वो पोजिशनर

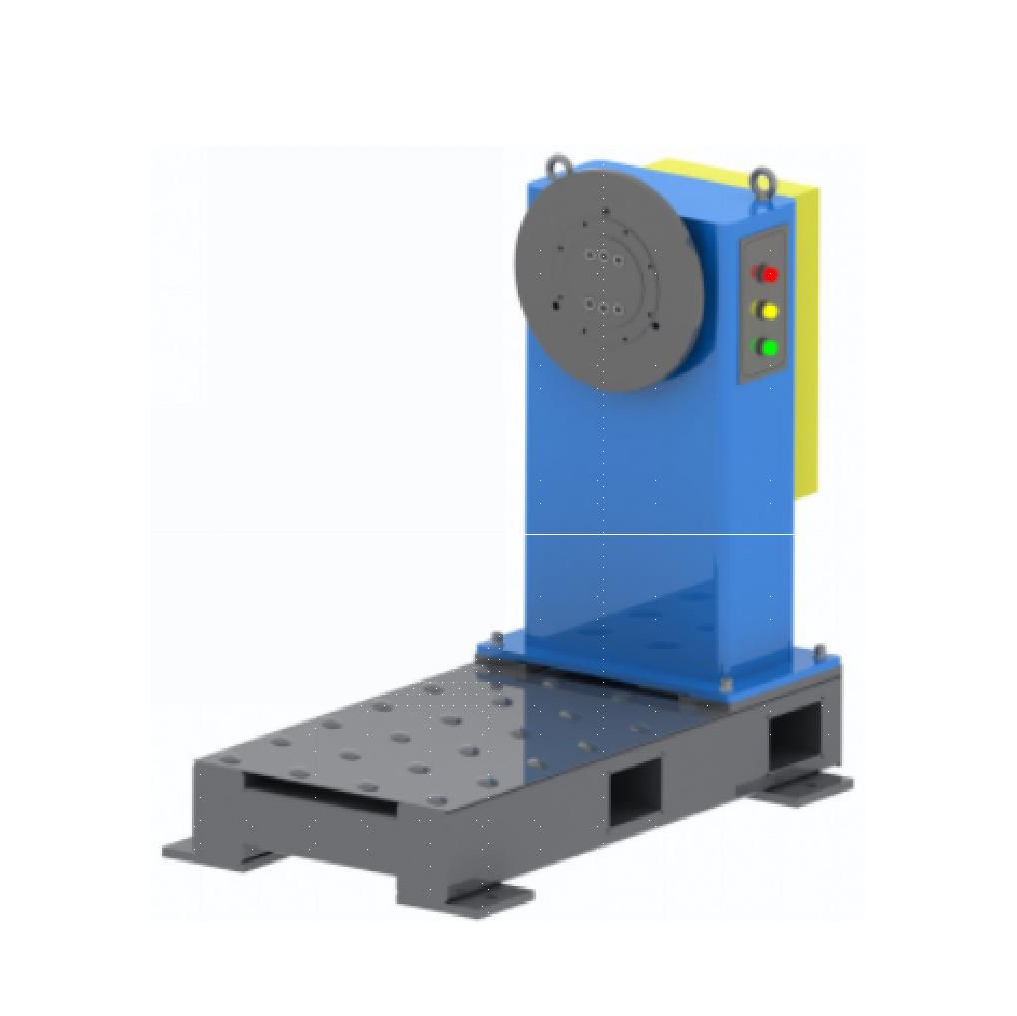
एकल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोजिशनर
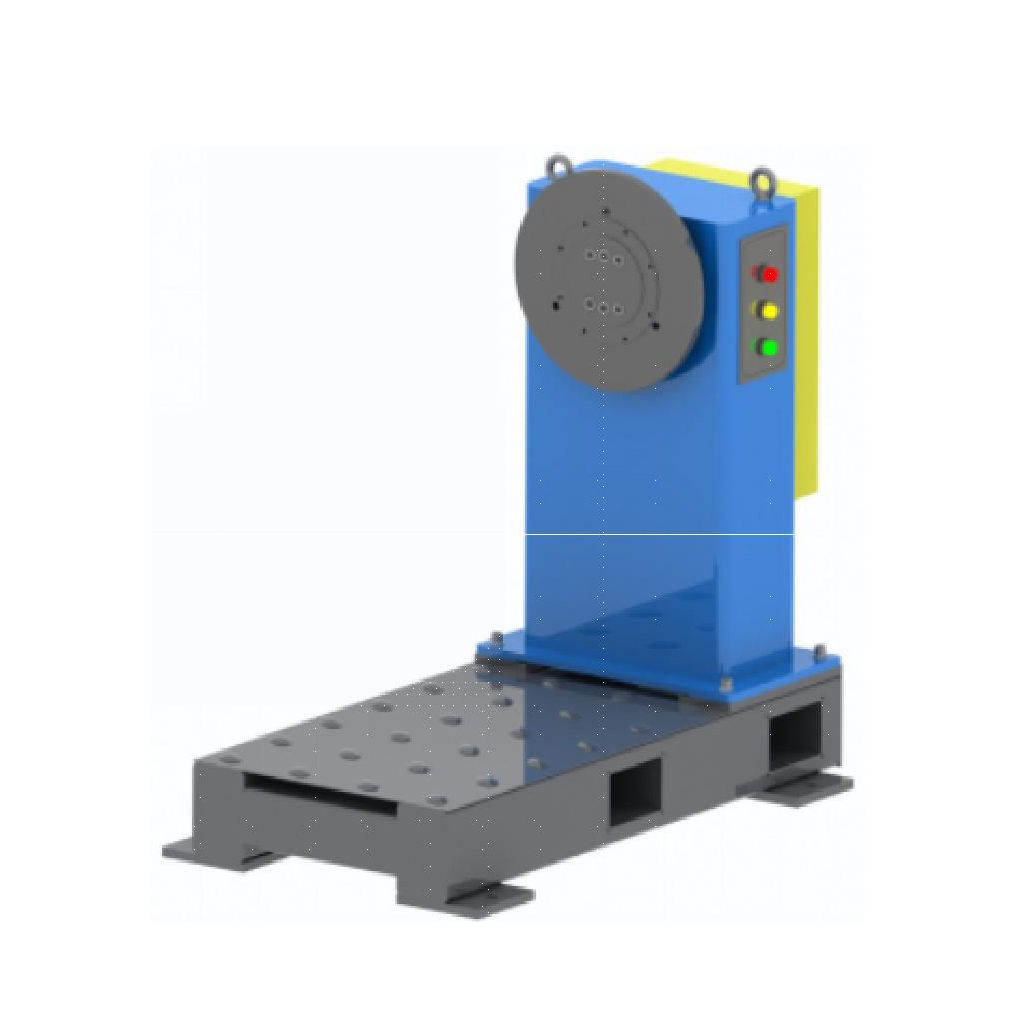
स्पिंडल बॉक्स प्रकार एकल-अक्ष सर्वो पोजिशनर
संरचना परिचय
एकल-अक्षीय क्षैतिज सर्वो पोजिशनर मुख्य रूप से एक एकीकृत स्थिर आधार, रोटरी स्पिंडल बॉक्स, क्षैतिज रोटरी डिस्क, एसी सर्वो मोटर और आर.वी. प्रिसिजन रिड्यूसर, प्रवाहकीय तंत्र, सुरक्षा कवच और विद्युत नियंत्रण प्रणाली से बना होता है। स्थिर आधार को उच्च-गुणवत्ता वाली प्रोफाइल से वेल्ड किया जाता है। एनीलिंग और तनाव-मुक्ति के बाद, उच्च मशीनिंग सटीकता सुनिश्चित करने और प्रमुख स्थितियों की सटीकता का उपयोग करने के लिए इसे पेशेवर मशीनिंग द्वारा संसाधित किया जाएगा। सतह पर जंग-रोधी रंग का छिड़काव किया जाता है, जो सुंदर और उदार होता है, और रंग ग्राहकों की आवश्यकताओं के अनुसार अनुकूलित किया जा सकता है।
रोटरी स्पिंडल बॉक्स के लिए चुने गए उच्च-गुणवत्ता वाले प्रोफ़ाइल स्टील से वेल्डिंग, एनीलिंग और पेशेवर मशीनिंग के बाद इसकी दीर्घकालिक स्थायित्व और स्थिरता सुनिश्चित की जा सकती है। क्षैतिज रोटरी डिस्क को उच्च-गुणवत्ता वाले प्रोफ़ाइल से वेल्ड किया जाता है। एनीलिंग उपचार के बाद, पेशेवर मशीनिंग सतह की फिनिशिंग की डिग्री और इसकी अपनी स्थिरता सुनिश्चित कर सकती है। ऊपरी सतह पर मानक अंतराल वाले स्क्रू छेद बनाए जाते हैं, जिससे ग्राहकों के लिए पोजिशनिंग टूलिंग को स्थापित और ठीक करना आसान हो जाता है।
एसी सर्वो मोटर और आरवी रिड्यूसर को पावर मैकेनिज्म के रूप में चुनने से घूर्णन की स्थिरता, सटीक स्थिति, लंबी अवधि का स्थायित्व और कम विफलता दर सुनिश्चित हो सकती है। प्रवाहकीय तंत्र पीतल से बना है, जिसका अच्छा प्रवाहकीय प्रभाव होता है। प्रवाहकीय आधार अभिन्न इन्सुलेशन को अपनाता है, जो सर्वो मोटर, रोबोट और वेल्डिंग पावर स्रोत की प्रभावी रूप से सुरक्षा कर सकता है।
विद्युत नियंत्रण प्रणाली, स्थिर प्रदर्शन और कम विफलता दर के साथ, पोजिशनर को नियंत्रित करने के लिए जापानी ओमरोन पीएलसी का उपयोग करती है। उपयोग की गुणवत्ता और स्थिरता सुनिश्चित करने के लिए, विद्युत घटकों का चयन देश-विदेश के प्रसिद्ध ब्रांडों से किया जाता है।








